热点资讯
联系方式
- 联系人:许经理
- 手机:18662538975
- 电话:0512-62764773
- 邮箱:xuyinghua@tst-robot.com
- 地址:江苏省苏州市高新技术开发区金燕路66号
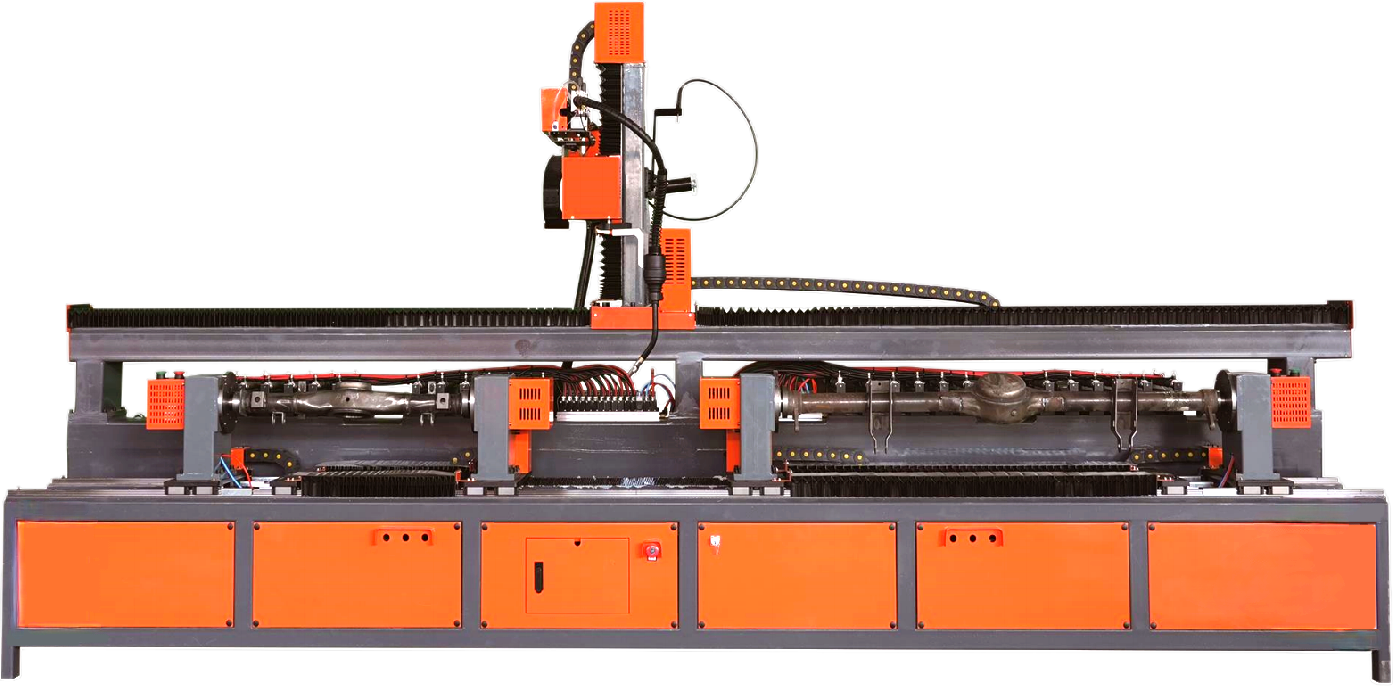
焊接变位机的使用原理
作者:小编 时间:2022/6/29 17:08:33
在我国,焊接变位机是一个年青的产品。因为制造业之间发展水平的差异,很多企业的焊接工位,还没有配备焊接变位机;同时,相关的研讨也比较单薄。迄今为止,没有专门著作去研讨它的界说和分类。对它的称呼也就不可能标准化了。同一种设备,不同的企业和不同的人可能有不同的称呼。如:转胎、转台、翻转架、变位器、变位机等。需要赋予它一个界说。
它改变了可能需要立焊、仰焊等难以确保焊接质量的施焊操作。然后,确保了焊接质量,提高了焊接生产率和生产过程的安全性。
能够必定的讲,如果一台变位机拖动焊件,仅做直线运动,哪怕是三维的,也不可能改变焊缝的姿态,满足施焊要求。也就是说,变位运动是反转运动,称此反转运动为变位机的主自由度。还能够做这样一个假设:在X、Y、Z直角坐标系下,设有一空间直线焊缝,绕Z轴可在360°范围内反转,且这个Z轴连同这一焊缝又可绕X(或Y)轴在≥180°范围内反转,那么,经此变位的焊缝,便可变到船角焊方位进行施焊作业。
换言之,一个焊口由两个面的共线MN和夹角α组成,在上述两个反转范围内,经恰当的反转,便可使其共线 MN 与水平面平行,且这两个面与水平面的夹角相等,各为α/2,即变为船角焊方位。这个假设是说,任何杂乱焊件,只要装在主自由度为一个全反转和一个半反转的焊接变位机上,即可实现船焊要求。我们称这种双反转式焊接变位机为全功能变位机。
MORE+推荐产品




MORE+推荐新闻
