- 联系人:许经理
- 手机:18662538975
- 电话:0512-62764773
- 邮箱:xuyinghua@tst-robot.com
- 地址:江苏省苏州市高新技术开发区金燕路66号
【免示教自动扫描】小型焊接机器人协作焊接机器人
作者:小编 时间:2024/8/15 11:21:05
|
|


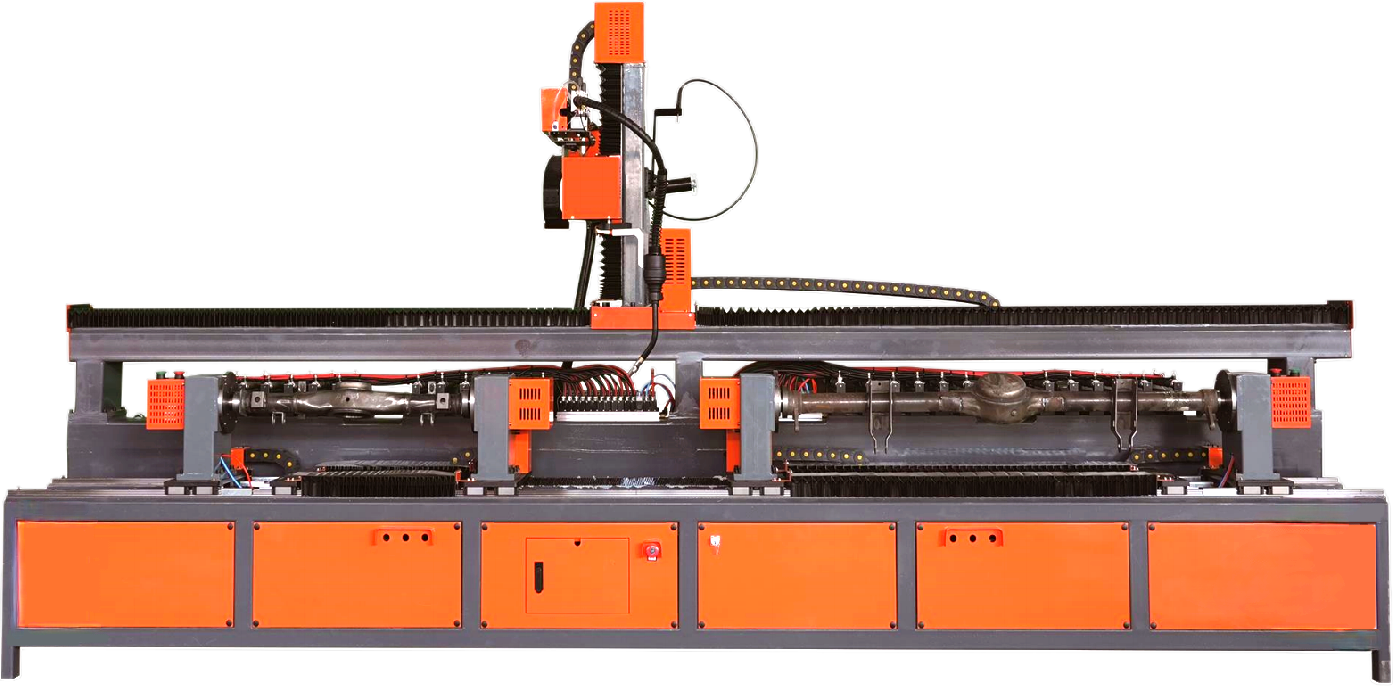
整机规格
·移动机器人自重:16kg
·强磁底座自重:3.5kg
·整机≤200kg
·移动小车尺寸:
1250mm(长)500mm(宽)899mm(高)
·强磁底座尺寸:150mm
技术参数
协作机器人本体 | 珞石协作六轴机器人xMate SR5-C机器人自重16KG/负载5KG/工作范围919mm |
协作机器人控制器 | 中集飞秒Femocontrol-i7 Pro |
协作机器人控制柜 | 中集飞秒FSJXF-X01 |
拖动控制方式 | 全关节6组高精度力矩传感器 |
视觉传感器 | 中集飞秒FemocamG3/Femocam ultra |
焊接类型 | 气保焊(CO2/混合气)、1.2mm/1.6mm实心/药芯焊丝(以实际配置为准) |
焊接工艺包 | 单道焊,直线/圆弧断续焊,多层多道焊,可每一道焊缝单独设置参数 |
焊接电源 | 麦格米特Ehave2 CM500R |
焊枪 | 特尔玛TRM501空冷焊枪 |
操作示教器 | 高等级抗跌落抗电磁辐射无线PDA,前后摄像头,影像二维码读码模组(可扫描构件二维码) |
装载机构 | 一体化装载移动小车,带动力线、气管航空插头 |
通讯方式 | Ethecate总线网口,英特尔千兆网口,WIFI56,蓝牙,内置4G无线模块 |
机器人计算单元性能 | 英特尔Intel i7-11th,512GB硬盘,16GB内存,瑞芯微RJ3399GPU |
视觉计算单元性能 | 英伟达nvidia GPU CUDA架构嵌入中集飞秒视觉识别算法 |
操作系统 | 预装正版Windows 10LTSC(64位),飞秒云控智能焊接系统(协作版) |
数字化系统 | 可选配“中集飞秒蜂鸟数字化平台”(开通附赠4G物联网sim卡) |
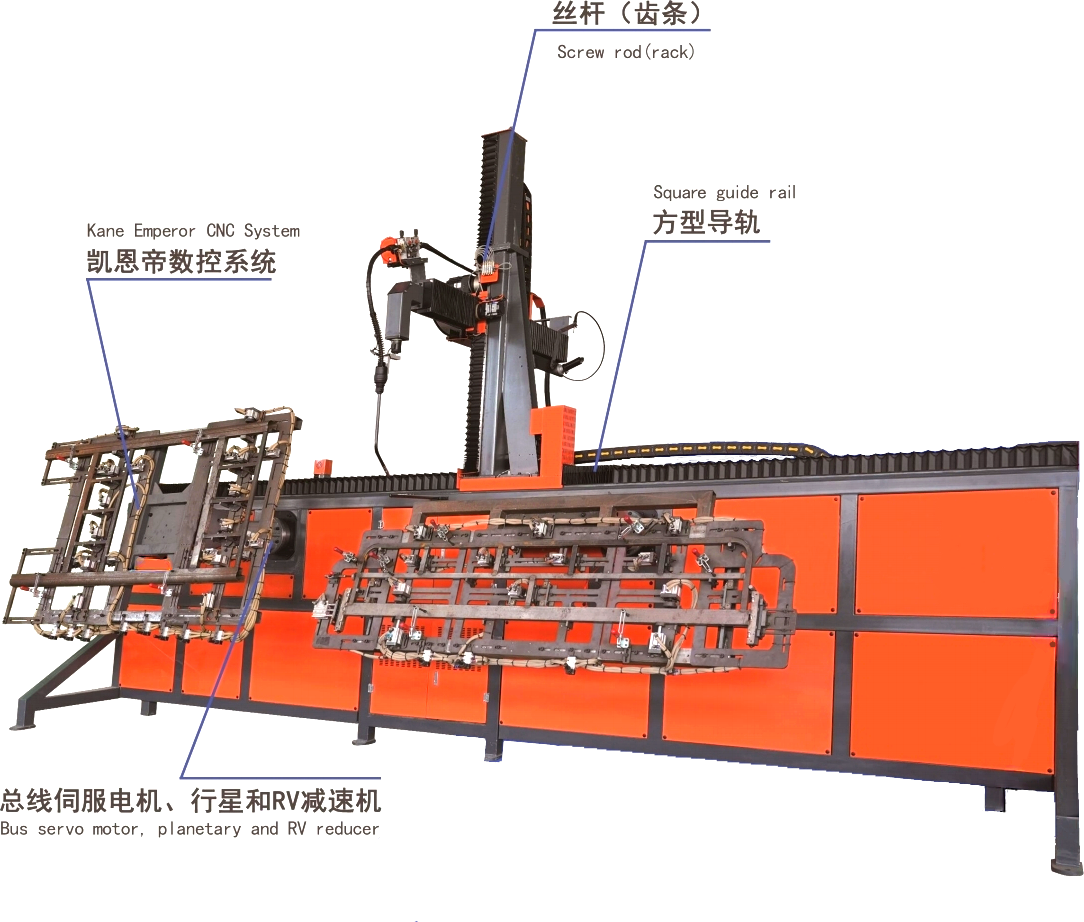
机器人底座选配类型 | —键式强磁底座/一键式强磁滑轮座/轻便型机器人伺服导轨 |
三大关键产品内核
轻盈高效焊接新体验
采用轻量化大臂展设计,搭载6组全关节力矩传感器,颠覆传统拖拽焊接,带来省时省力的丝滑体验。用户口碑见证其卓越性能。
智能视觉提升生产力
全系标配尖端3D 视觉传感器,结合中集飞秒工业视觉算法,使机器人自动识别焊缝,智能规划焊接路径,极大提高生产效率。
自主研发,掌控未来
全新自研机器人核心控制器,全闭环掌控机器人底层到软件算法,为客户提供最领先的技术及持续升级与长效保障,创造真实价值。
强大的硬件产品平台
自研机器人控制系统,以其自主研发的控制柜和一体化控制器为核心,兼容并控制多种第三方机械臂与焊接设备。内置的自研视 觉传感器,辅以Al算法,精准捕捉工件特征,高效规划焊接路径。便携式自研PDA 设备,使焊接示教操作更为灵活便捷,同时支持多种配 件选择,满足不同工况下的焊接需求。
 合作伙伴携手共进
合作伙伴携手共进
如果需要进一步了解,请联系我们
公 司: 苏州正四方机器人科技有限公司
地 址: 江苏省苏州市高新技术开发区金燕路66号
联系人: 许经理
手 机: 186-6253-8975 189-1378-7977