热点资讯
联系方式
- 联系人:许经理
- 手机:18662538975
- 电话:0512-62764773
- 邮箱:xuyinghua@tst-robot.com
- 地址:江苏省苏州市高新技术开发区金燕路66号
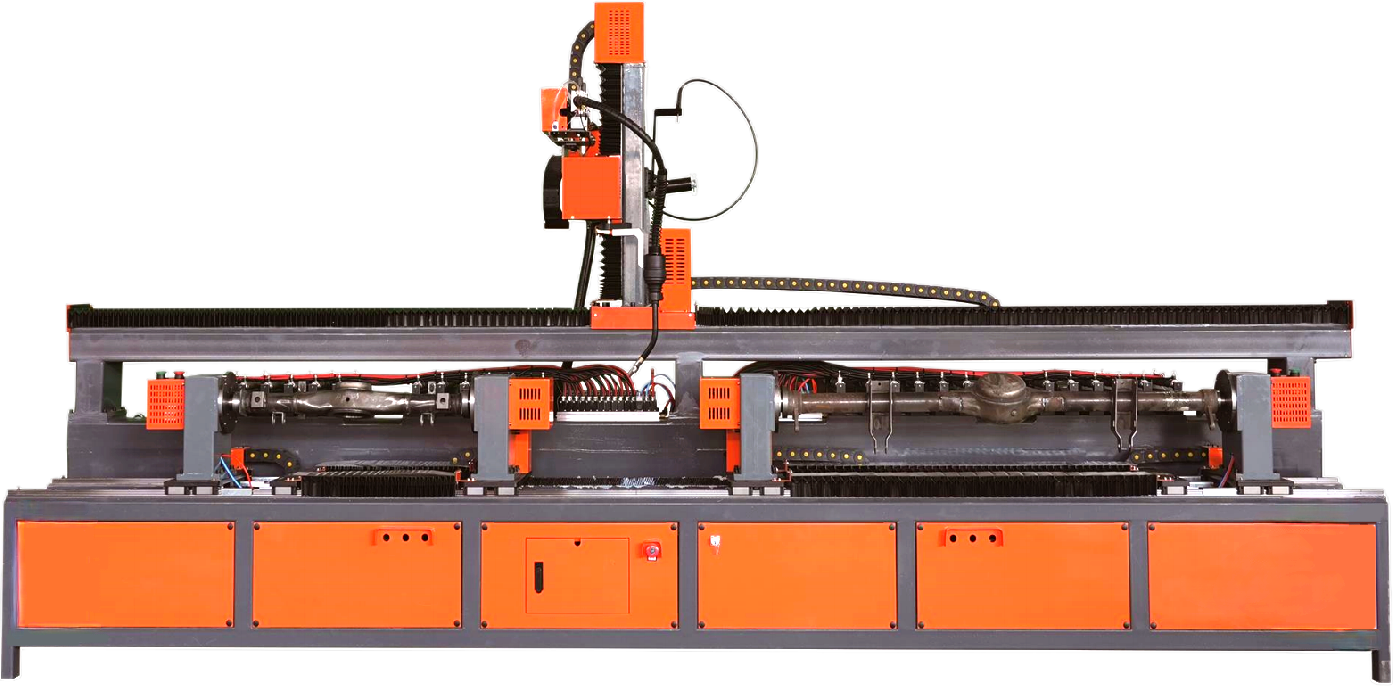
焊接机器人的基本配置
作者:小编 时间:2021/11/12 10:19:19
相应于别的焊接工艺而言,点焊工艺算作规定较为低的了,因此它对常用机器人的规定也不易很高。就算是这般,人们也得清晰把握点焊机器人的基本要素。

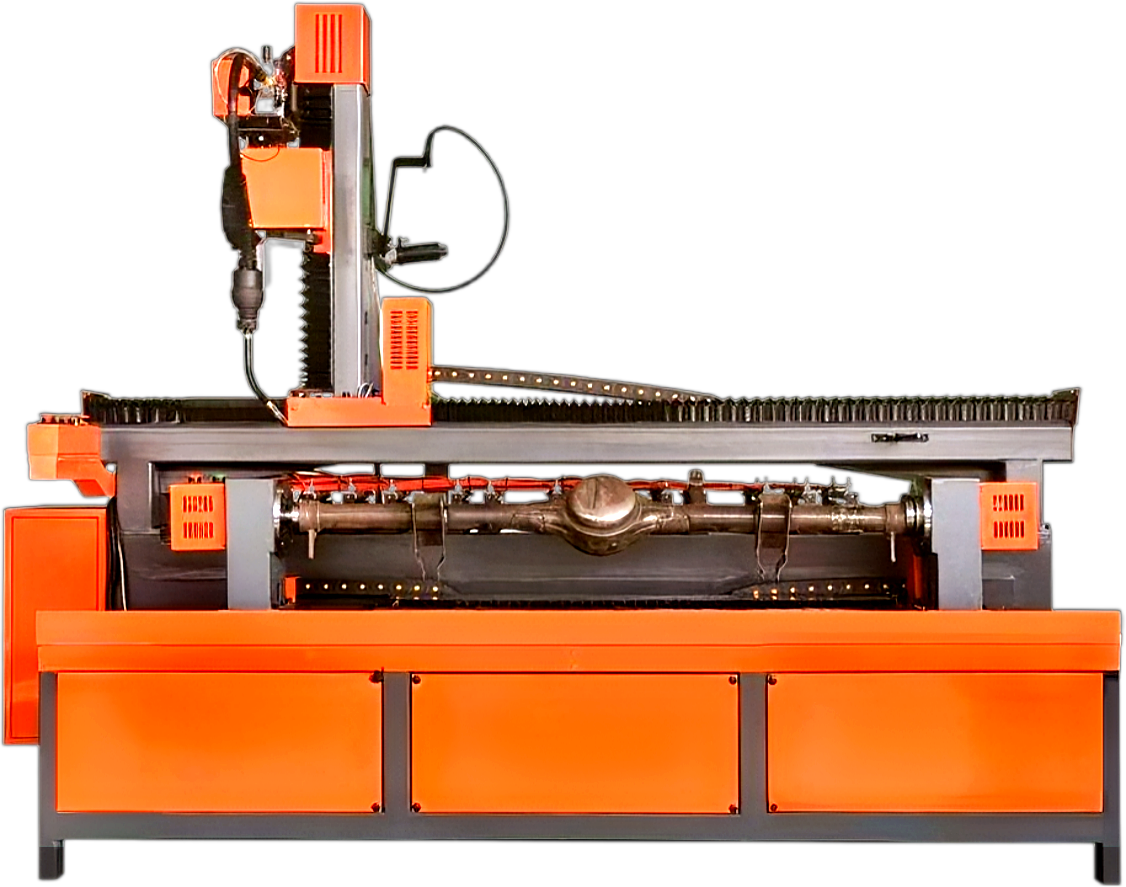
在开展点焊流程中,只必须做好定位点操纵,而焊钳在点与点中间的挪动轨迹沒有严格管理。更是由于这般,点焊机器人不但要有足够的负荷能力,并且在点与点中间挪动时速率要便捷,姿势要稳定,标记要精确,以降低移位的時间,提高效率。
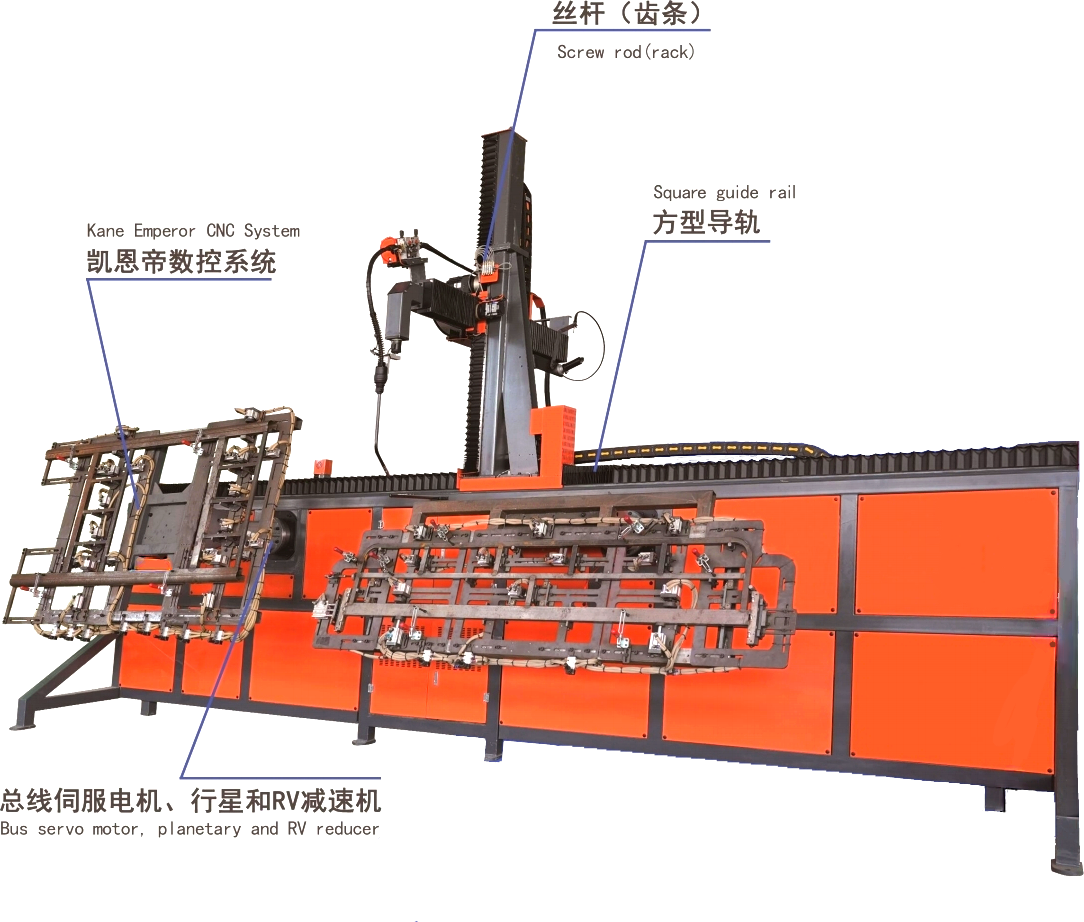
针对点焊机器人必须有多少的负荷能力,挺大水平上在于常用的焊钳方式,一般针对用与变压器分开的焊钳,30~45kg负荷的机器人就足够了。可是,这类焊钳不仅因为再次电缆线长,电磁能耗损大,也有损机械人将焊钳伸进工件內部焊接;与此同时电线随机器人运功而不断晃动,线缆的毁坏迅速。因而,现阶段早已逐渐换为分离式焊钳。
这类焊钳连同变压器品质在70kg左右,考虑到机器人要有足够的负载能力,能以较大的加速度将焊钳送到空间位置进行焊接,一般都选用100~150kg负载的重型机器人。


MORE+推荐产品




MORE+推荐新闻
